
The Hyperloop Concept
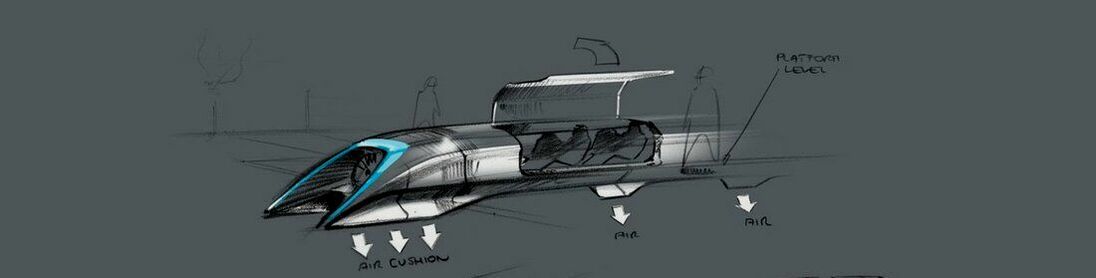
In 2013, Elon Musk published the Hyperloop Alpha whitepaper detailing a new concept for high speed transportation featuring low-pressure underground tunnels where transportation pods travel at high-speeds with near-zero drag. For example, a hyperloop from Los Angeles to San Fransisco would only take 36 minutes. Our current transportation infrastructure: cars on highways, planes in the sky, relatively slow high-speed trains, and costly boating and freight travel - all see bottlenecks to efficiency and their environmental cost. These challenges are minimized in the hyperloop concept.
Sustainability is at the heart of the hyperloop concept through the use of electric motors for propulsion that eliminate all emissions, environmentally-friendly plastics and polymers, an a minimized carbon footprint with the recycling of excavation materials to build low-income housing. As a modern transportation solution hyperloop is conscientious of renewability and the sustainable, fair practices required to lower our carbon footprint.
Sustainability is at the heart of the hyperloop concept through the use of electric motors for propulsion that eliminate all emissions, environmentally-friendly plastics and polymers, an a minimized carbon footprint with the recycling of excavation materials to build low-income housing. As a modern transportation solution hyperloop is conscientious of renewability and the sustainable, fair practices required to lower our carbon footprint.
The Hyperloop Competition
The Cal Poly Hyperloop Team formed in Spring of 2018 and was selected to compete in the 2019 SpaceX Hyperloop Pod Competition, the final official SpaceX Hyperloop Competition. In this global competition where teams design and build sub-scale Hyperloop pods, which are propelled inside a one-mile long, partial-vacuum sealed tube, 22 teams were selected to take their fully constructed Hyperloop pods to SpaceX Headquarters in Hawthorne, California and compete for top speed. At this competition, the placed fifth and the following year began designing several new Hyperloop components for future use.
THE POD - 2021
PropulsionThe pod this year is propelled by an in-house manufactured linear induction motor. The linear motor creates a three-phase signal that induces an opposing magnetic field on the track, which subsequently accelerates the pod along the track at high speeds. This system both works as propulsion and braking depending on the orientation of the three-phase signal produced.
|
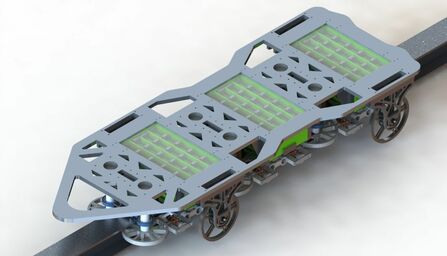
ChassisThe chassis has been redesigned from the ground up to be as modular as possible in order to quickly modify the chassis through design iterations.
|
ControlsThe brain of the pod, the controls team, has created a SpaceX inspired GUI that sleekly communicates information from all sensors on the pod to the members of the team.
|
ElectronicsThe electronics team supplies power to all subsystems in order for the pod to work. The power system is split into two portions: high power for the linear induction motor, and low power for the controls and braking system.
|
TransportationThe transportation team works in tandem with the chassis team by using a series of wheels and cantilevers running against the track to ensure that the pod runs smoothly.
|
BrakingLike the previous pod design, the braking system is designed as a failsafe mechanism, and has been outfitted with a power off feature. In the event of a propulsion or power failure, the brakes automatically deploy, preventing serious damage to the pod or track.
|
THE POD - 2019
PropulsionThe pod is propelled with a direct drive system of drive wheels connected to brushless DC outrunner motors. The motors are tensioned into the I-beam centered in the Hyperloop tube with a pneumatic active tensioner.
|
PowerPower is supplied to the propulsion system by three independent Li-Fe battery packs. All non-propulsion power requirements will run off a 12V battery.
|
BrakingOur frictional braking system activates through a simple mechanism and is precisely controlled with a pneumatic pressure system. This system is designed to be an absolute failsafe, as the pod is quickly stopped in the event of any disruption in normal pod operation.
|
ChassisIn order to keep manufacturing and maintenance as simple as possible, every component is bolt-on. The unibody chassis not only provides a uniform mounting surface for the required pod components, but allows cargo and people to be easily incorporated into a scaled hyperloop pod.
|
TransportationRoll motion is minimized by four support wheels flanking the chassis. Pitch is maintained by a series of casters that sandwich the rail. Yaw motion is minimized by the active tensioner and can be manipulated to account for curves in the track.
|
ControlsThe control system monitors an array of sensor values to ensure dependable system operation. The propulsion system and pneumatics are always managed by the control system during pod operation. A Raspberry Pi manages decision making with peripheral MCUs.
|